



"부분적으로 자동 운전이 가능한 자동차는 수년 내에 등장할 수 있다. 2020년까지는 좀더 정교한 자동 운전 시스템이 나올 것이다." GM의 글로벌 연구 개발 부문 Alan Taub 부사장은 지난 일요일(현지기준) 미국 올란도에서 개최된 ITS월드 콩그레스(Intelligent Transport Systems World Congress)에서 이렇게 밝혔다.
가까운 미래에 현실화될 자동 운전 기술들은 이미 양산차들에 적용되기 시작한 첨단 능동 안전 시스템들을 기반으로 만들어진다. 센서, 레이더, 휴대용 통신기기, GPS, 카메라 등이 운전자와 자동차의 컴퓨터 시스템에 중요한 정보를 제공하는데, 여기에 디지털 지도가 결합됨으로써 자동차가 스스로 운전을 하는 동안 운전자는 딴짓(?)을 할 수 있게 된다.
이러한 기술은 운전에 대한 부담을 부분적으로, 또는 완전히 제거함으로써 추가적인 편의성을 제공하지만, 주요 목표는 안전이다. 미래의 안전 시스템은 운전자가 위험한 상황을 미처 알기도 전에 운전자를 대신해 충돌을 회피하게 될 것이다. 그리고 자동차회사들은 이미 이런 첨단 안전 시스템의 일부를 제품에 적용하고 있다. 차선 이탈 경보 장치, 측면 사각지대 경보 장치 등이 좋은 예이다.
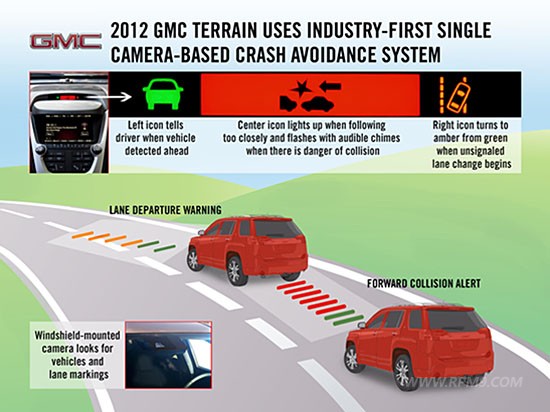 <▲ 2012 GMC Terrain의 충돌 위험 경고 장치>
<▲ 2012 GMC Terrain의 충돌 위험 경고 장치>
GM은 2012년형 GMC터레인에 업계 최초로 충돌 회피 시스템을 적용한다고 밝혔다. 이 시스템은 앞유리에 부착된 고화소 디지털 카메라로 전방의 차량 형상과 차선 표시를 인식하고 추돌이나 차선이탈로 인한 사고 위험을 경고한다.
자동차와 자동차간, 자동차와 기반시설간의 통신 시스템도 주목 받고 있다. 다른 차량은 물론 도로, 표지판 등으로부터도 사고 예방에 유용한 정보를 수집할 수 있다. 보이지 않는 전방의 서행 차량, 고장차량, 급제동 차량, 미끄러운 도로, 급커브, 정지신호, 교차로 정보 등을 미리 알 수 있다. 이 시스템은 차량에 내장하거나 어플리케이션의 형태로 휴대용 기기, 스마트 폰에 적용해 무선으로 차량과 연동할 수 있다.
GM이 선보인 도심용 자율 주행 자동차, EN-V도 자동 운전 차량의 가능성을 잘 보여준다. GPS, 차량간 통신, 거리 인식 기술 등을 통해 자동운전이 가능한 EN-V는 보행자 인식, 충돌 회피, 그룹 주행, 자동주차, 회수 등 다양한 기능을 수행한다. 목적지에 탑승자를 내려 준 뒤 스스로 차고지로 돌아가고, 스마트 폰으로부터 명령을 전송 받아 탑승자를 태우러 가기도 한다.
 <▲ GM이 쉐보레 브랜드로 선보일 EN-V>
<▲ GM이 쉐보레 브랜드로 선보일 EN-V>
